Sun Tracker (input(4 buah sensor LDR) dan output(motor DC & 7 7-segment))
Sun Tracker (input(4 buah sensor LDR) dan output(motor DC & 7 7-segment))
1. Tujuan [Kembali]
- Mempelajari prinsip kerja Sun Tracker menggunakan 4 buah sensor LDR
- Mempelajari simulasi rangkaian Sun Tracker menggunakan 4 buah sensor LDR
- Memahami bagaimana Prinsip kerja dai interface Mikroprossesor 8088
2. Alat dan Bahan [Kembali]
1. Voltmeter DC

Spesifikasi
- Rentang pengukuran: Ini mengacu pada rentang tegangan yang dapat diukur oleh voltmeter. Misalnya, voltmeter mungkin memiliki rentang pengukuran antara 0 hingga 10 volt atau 0 hingga 1000 volt.
- Akurasi: Ini adalah tingkat ketepatan voltmeter dalam mengukur tegangan. Akurasi biasanya dinyatakan dalam persentase kesalahan maksimum. Sebagai contoh, voltmeter mungkin memiliki akurasi ±1% yang berarti kesalahan maksimum yang mungkin terjadi adalah 1% dari nilai yang diukur.
- Resolusi: Resolusi mengacu pada jumlah digit yang ditampilkan pada voltmeter. Resolusi yang lebih tinggi berarti voltmeter dapat menampilkan angka yang lebih rinci. Sebagai contoh, voltmeter dengan resolusi 3 digit dapat menampilkan angka hingga tiga angka di belakang koma.
- Impedansi input: Ini adalah resistansi internal voltmeter terhadap arus listrik yang melewati alat. Impedansi input yang lebih tinggi pada voltmeter memungkinkan pengukuran tegangan yang lebih akurat tanpa mengganggu sirkuit yang sedang diukur.
- Jenis input: Voltmeter dapat dirancang untuk mengukur tegangan searah (DC) atau tegangan bolak-balik (AC). Beberapa voltmeter juga dapat mengukur kedua jenis tegangan.
2. Battery

- Input voltage: ac 100~240v / dc 10~30v
- Output voltage: dc 1~35v
- Max. Input current: dc 14a
- Charging current: 0.1~10a
- Discharging current: 0.1~1.0a
- Balance current: 1.5a/cell max
- Max. Discharging power: 15w
- Max. Charging power: ac 100w / dc 250w
- Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
- Ukuran: 126x115x49mm
- Berat: 460gr
3. Power

- Daya listrik (Power supply): Ini mengacu pada daya yang diberikan oleh sumber listrik ke peralatan elektronik. Daya ini diukur dalam watt (W). Spesifikasi daya listrik mencakup tegangan input yang diperlukan (misalnya 110V atau 220V AC) dan frekuensi (misalnya 50Hz atau 60Hz).
- Konsumsi daya (Power consumption): Ini adalah jumlah daya yang dikonsumsi oleh peralatan elektronik saat beroperasi. Konsumsi daya juga diukur dalam watt (W) dan umumnya dicantumkan dalam spesifikasi produk. Informasi ini membantu untuk mengetahui berapa banyak daya yang diperlukan oleh peralatan tersebut dan mempengaruhi kebutuhan daya listrik yang dibutuhkan.
- Daya output (Power output): Jika Anda merujuk pada peralatan yang menghasilkan daya, seperti power amplifier atau power bank, spesifikasi power output akan memberikan informasi tentang daya yang dihasilkan oleh perangkat tersebut. Ini juga diukur dalam watt (W) dan mungkin mencakup spesifikasi daya maksimum dan daya kontinu yang dapat dihasilkan.


.jpg)



- Op-Amp



- 7 Segment Anoda
















3. Dasar Teori [Kembali]
- RESISTOR
Resistor merupakan komponen elektronika dasar yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Resistor memiliki simbol seperti gambar dibawah ini :

Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :



Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
- DIODA

Cara Kerja Dioda
Secara sederhana, cara kerja dioda dapat dijelaskan dalam tiga kondisi, yaitu kondisi tanpa tegangan (unbiased), diberikan tegangan positif (forward biased), dan tegangan negatif (reverse biased).
Pada kondisi tidak diberikan tegangan akan terbentuk suatu perbatasan medan listrik pada daerah P-N junction. Hal ini terjadi diawali dengan proses difusi, yaitu bergeraknya muatan elektro dari sisi n ke sisi p. Elektron-elektron tersebut akan menempati suatu tempat di sisi p yang disebut dengan holes. Pergerakan elektron-elektron tersebut akan meninggalkan ion positif di sisi n, dan holes yang terisi dengan elektron akan menimbulkan ion negatif di sisi p. Ion-ion tidak bergerak ini akan membentuk medan listrik statis yang menjadi penghalang pergerakan elektron pada dioda.

Pada kondisi ini, bagian anoda disambungkan dengan terminal positif sumber listrik dan bagian katoda disambungkan dengan terminal negatif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Ion-ion negatif akan tertarik ke sisi anoda yang positif, dan ion-ion positif akan tertarik ke sisi katoda yang negatif. Hilangnya penghalang-penghalang tersebut akan memungkinkan pergerakan elektron di dalam dioda, sehingga arus listrik dapat mengalir seperti pada rangkaian tertutup.

C. Kondisi tegangan negatif (Reverse-bias)
Pada kondisi ini, bagian anoda disambungkan dengan terminal negatif sumber listrik dan bagian katoda disambungkan dengan terminal positif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Pemberian tegangan negatif akan membuat ion-ion negatif tertarik ke sisi katoda (n-type) yang diberi tegangan positif, dan ion-ion positif tertarik ke sisi anoda (p-type) yang diberi tegangan negatif. Pergerakan ion-ion tersebut searah dengan medan listrik statis yang menghalangi pergerakan elektron, sehingga penghalang tersebut akan semakin tebal oleh ion-ion. Akibatnya, listrik tidak dapat mengalir melalui dioda dan rangkaian diibaratkan menjadi rangkaian terbuka.

- Relay


Tegangan coil: DC 5V
Struktur: Sealed type
Sensitivitas coil: 0.36W
Tahanan coil: 60-70 ohm
Kapasitas contact: 10A/250VAC, 10A/125VAC, 10A/30VDC, 10A/28VDC
Ukuran: 196154155 mm
Jumlah pin: 5
Konfigurasi Pin




Transistor NPN

Rumus dari Transitor adalah :
hFE = iC/iB
dimana, iC = perubahan arus kolektor
iB = perubahan arus basis
hFE = arus yang dicapai
Karakteristik Input
Transistor adalah komponen aktif yang menggunakan aliran electron sebagai prinsip kerjanya didalam bahan. Sebuah transistor memiliki tiga daerah doped yaitu daerah emitter, daerah basis dan daerah disebut kolektor. Transistor ada dua jenis yaitu NPN dan PNP. Transistor memiliki dua sambungan: satu antara emitter dan basis, dan yang lain antara kolektor dan basis. Karena itu, sebuah transistor seperti dua buah dioda yang saling bertolak belakang yaitu dioda emitter-basis, atau disingkat dengan emitter dioda dan dioda kolektor-basis, atau disingkat dengan dioda kolektor.
Bagian emitter-basis dari transistor merupakan dioda, maka apabila dioda emitter-basis dibias maju maka kita mengharapkan akan melihat grafik arus terhadap tegangan dioda biasa. Saat tegangan dioda emitter-basis lebih kecil dari potensial barriernya, maka arus basis (Ib) akan kecil. Ketika tegangan dioda melebihi potensial barriernya, arus basis (Ib) akan naik secara cepat.
Karakteristik Output
Sebuah transistor memiliki empat daerah operasi yang berbeda yaitu daerah aktif, daerah saturasi, daerah cutoff, dan daerah breakdown. Jika transistor digunakan sebagai penguat, transistor bekerja pada daerah aktif. Jika transistor digunakan pada rangkaian digital, transistor biasanya beroperasi pada daerah saturasi dan cutoff. Daerah breakdown biasanya dihindari karena resiko transistor menjadi hancur terlalu besar.
Gelombang I/O Transistor
- OP-AMP



Karakteristik IC OpAmp
- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu
Karakteristik IC OpAmp
- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu

Inverting Amplifier









- Type: Rotary a.k.a Radio POT
- Available in different resistance values like 500Ω, 1K, 2K, 5K, 10K, 22K, 47K, 50K, 100K, 220K, 470K, 500K, 1 M.
- Power Rating: 0.3W
- Maximum Input Voltage: 200Vdc
- Rotational Life: 2000K cycles
Pin No. | Pin Name | Description |
1 | Fixed End | This end is connected to one end of the resistive track |
2 | Variable End | This end is connected to the wiper, to provide variable voltage |
3 | Fixed End | This end is connected to another end of the resistive track |

- Gerbang NOT (IC 7404)
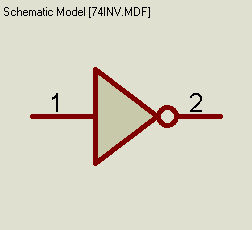
Gerbang NOT atau disebut juga "NOT GATE" atau Inverter (Gerbang Pembalik) adalah jenis gerbang logika yang hanya memiliki satu input (Masukan) dan satu output (keluaran). Dikatakan Inverter (gerbang pembalik) karena gerbang ini akan menghasilkan nilai ouput yang berlawanan dengan nilai inputnya . Untuk lebih jelasnya perhatikan simbol dan tabel kebenaran gerbang NOT berikut.

Gerbang NOT, juga dikenal sebagai inverter, adalah gerbang logika yang menghasilkan keluaran yang kebalikan dari masukan. Pada gerbang logika NOT, simbol yang menandakan operasi gerbang logika NOT adalah tanda minus (-) diatas variabel, perhatikan gambar diatas.
Simbol dan Notasi
- Simbol gerbang NOT biasanya direpresentasikan oleh sebuah segitiga dengan lingkaran di dalamnya atau dengan simbol "bubble" pada simbol logika standar.
- Notasi matematika untuk gerbang NOT dapat disimbolkan sebagai ~A atau A'.
Perhatikan tabel kebenaran gerbang NOT. Cara cepat untuk mengingat tabelnya adalah dengan mengingat pernyataan berikut. "Gerbang NOT akan menghasilkan output (keluaran) logika 1 bila variabel input (masukan) bernilai logika 0" sebalikanya "Gerbang NOT akan menghasilkan keluaran logika 0 bila input (masukan) bernilai logika 1"
Operasi Logika
- Gerbang NOT melakukan operasi kebalikan atau negasi pada masukan.
- Jika masukan adalah logika tinggi (1), keluaran akan menjadi logika rendah (0), dan sebaliknya.
- Decoder (IC 7447)
IC BCD 7447 merupakan IC yang bertujuan mengubah data BCD (Binary Coded Decimal) menjadi suatu data keluaran untuk seven segment. IC 7447 yang bekerja pada tegangan 5V ini khusus untuk menyalakan seven segment dengan konfigurasi common anode. Sedangkan untuk menyalakan tampilan seven segment yang bekerja pada konfigurasi common cathode menggunakan IC BCD 7448.
IC ini sangat membantu untuk meringkas masukan seven segmen dengan jumlah 7 pin, sedangkan jika menggunakan BCD cukup dengan 4 bit masukan. IC BCD bisa juga disebut dengan driver seven segment. Berikut konfigurasi Pin IC 7447.
Spesifikasi dari decoder 7447:
Jumlah pin: 16 pin
Kemasan: DIP
Keluarga: TTL
Tegangan sumber: +5 volt DC
Input: 4 bit BCD (Q0-Q3), aktif HIGH
Output: 7 segmen (A-G, DP), aktif HIGH
Konfigurasi Pin Decoder:

a. Pin Input IC BCD, memiliki fungsi sebagai masukan IC BCD yang terdiri dari 4 Pin, nama pin masukan BCD dilangkan dengan huruf kapital yaitu A, B, C dan D. Pin input berkeja dengan logika High=1.
b. Pin Ouput IC BCD, memiliki fungsi untuk mengaktifkan seven segmen sesuai data yang diolah dari pin input. Pin output berjumlah 7 pin yang namanya dilambangkan dengan aljabar huruf kecil yaitu, b, c, d, e, f dan g. Pin Output bekerja dengan logika low=0. Karena itulah IC 7447 digunakan untuk seven segment common anode.
c. Pin LT (Lamp Test) memiliki fungsi untuk mengaktifkan semua output menjadi aktif low, sehingga semua led pada seven segmen menyala dan menampilkan angka 8. Pin LT akan aktif jika diberi logika low. Pin ini juga digunakan untuk mengetes kondisi LED pada seven segment.
d. Pin RBI (Ripple Blanking Input) memiliki fungsi untuk menahan data input (disable input), pin RBI akan aktif jika diberi logika low. Sehingga seluruh pin output akan berlogika High, dan seven segment tidak aktif.
e. Pin RBO (Ripple blanking Output) memiliki fungsi untuk menahan data output (disable output), pin RBO ini akan aktif jika diberikan logika Low. Sehingga seluruh pin output akan berlogika High, dan seven segment tidak aktif.
Pada aplikasi IC dekoder 7447, ketiga pin (LT, RBI dan RBO) harus diberi logika HIGH=1 agar tidak aktif. Baik IC 7447 atau 7448 pada bagian output perlu dipasang resistor untuk membatasi arus yang keluar sehingga led pada seven segment bekerja secara optimal. Berikut ini rangkaian IC dekoder 7448 untuk konfigurasi seven segment common cathode.
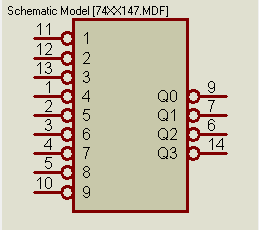
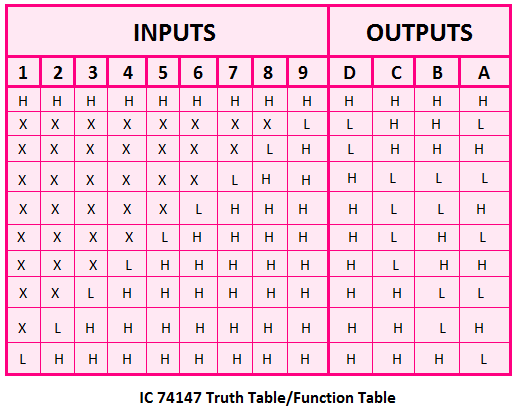
- Encoder 74147
- 7 Segment Anoda

Seven segment merupakan bagian-bagian yang digunakan untuk menampilkan angka atau bilangan decimal. Seven segment tersebut terbagi menjadi 7 batang LED yang disusun membentuk angka 8 dengan menggunakan huruf a-f yang disebut DOT MATRIKS. Setiap segment ini terdiri dari 1 atau 2 LED (Light Emitting Dioda). Seven segment bisa menunjukan angka-angka desimal serta beberapa bentuk tertentu melalui gabungan aktif atau tidaknya LED penyususnan dalam seven segment.
Supaya memudahkan penggunaannnya biasanya memakai sebuah sebuah seven segment driver yang akan mengatur aktif atau tidaknya led-led dalam seven segment sesuai dengan inputan biner yang diberikan. Bentuk tampilan modern disusun sebagai metode 7 bagian atau dot matriks. Jenis tersebut sama dengan namanya, menggunakan sistem tujuh batang led yang dilapis membentuk angka 8 seperti yang ditunjukkan pada gambar di atas. Huruf yang dilihatkan dalam gambar itu ditetapkan untuk menandai bagian-bagian tersebut.
Dengan menyalakan beberapa segmen yang sesuai, akan dapat diperagakan digit-digit dari 0 sampai 9, dan juga bentuk huruf A sampai F (dimodifikasi). Sinyal input dari switches tidak dapat langsung dikirimkan ke peraga 7 bagian, sehingga harus menggunakan decoder BCD (Binary Code Decimal) ke 7 segmen sebagai antar muka. Decoder tersebut terbentuk dari pintu-pintu akal yang masukannya berbetuk digit BCD dan keluarannya berupa saluran-saluran untuk mengemudikan tampilan 7 segmen.

Tabel Pengaktifan Seven Segment Display

A. Spesifikasi
- Available in two modes Common Cathode (CC) and Common Anode (CA)
- Available in many different sizes like 9.14mm,14.20mm,20.40mm,38.10mm,57.0mm and 100mm (Commonly used/available size is 14.20mm)
- Available colours: White, Blue, Red, Yellow and Green (Res is commonly used)
- Low current operation
- Better, brighter and larger display than conventional LCD displays.
- Current consumption : 30mA / segment
- Peak current : 70mA
B. Konfigurasi pin
Pin Number | Pin Name | Description |
1 | e | Controls the left bottom LED of the 7-segment display |
2 | d | Controls the bottom most LED of the 7-segment display |
3 | Com | Connected to Ground/Vcc based on type of display |
4 | c | Controls the right bottom LED of the 7-segment display |
5 | DP | Controls the decimal point LED of the 7-segment display |
6 | b | Controls the top right LED of the 7-segment display |
7 | a | Controls the top most LED of the 7-segment display |
8 | Com | Connected to Ground/Vcc based on type of display |
9 | f | Controls the top left LED of the 7-segment display |
10 | g | Controls the middle LED of the 7-segment display |
- Logic State

Status logika Pengertian logis, benar atau salah, dari sinyal biner yang diberikan. Sinyal biner adalah sinyal digital yang hanya memiliki dua nilai yang valid. Dalam istilah fisik, pengertian logis dari sinyal biner ditentukan oleh level tegangan atau nilai arus sinyal, dan ini pada gilirannya ditentukan oleh teknologi perangkat. Dalam sirkuit TTL, misalnya, keadaan sebenarnya diwakili oleh logika 1, kira-kira sama dengan +5 volt pada garis sinyal; logika 0 kira-kira 0 volt. Tingkat tegangan antara 0 dan +5 volt dianggap tidak ditentukan.
Logic State merujuk pada kondisi atau keadaan suatu sirkuit logika pada suatu waktu tertentu. Dalam sistem digital, Logic State dapat berupa logika tinggi (1) atau logika rendah (0).
Sistem logika digital umumnya menggunakan notasi biner, di mana 1 mengindikasikan logika tinggi (biasanya tegangan tinggi), dan 0 mengindikasikan logika rendah (biasanya tegangan rendah).
Level logika tinggi dan rendah ditentukan oleh batas tegangan tertentu pada suatu sirkuit logika. Contoh, dalam sistem yang menggunakan tegangan 0-5V, mungkin level logika tinggi adalah di atas 2,5V, dan level logika rendah di bawah 2,5V.
Spesifikasi Logic State
1. Tegangan Logic High (V<sub>OH</sub>): Nilai tegangan yang dianggap sebagai logika tinggi.
2. Tegangan Logic Low (V<sub>OL</sub>): Nilai tegangan yang dianggap sebagai logika rendah.
3. Arus Logic High (I<sub>OH</sub>): Arus yang mengalir saat output logika tinggi.
4. Arus Logic Low (I<sub>OL</sub>): Arus yang mengalir saat output logika rendah.
Sirkuit logika dapat terdiri dari gerbang logika dasar (AND, OR, NOT) atau flip-flop yang membentuk sirkuit lebih kompleks. Konfigurasi sirkuit logika dapat menggabungkan gerbang logika untuk melakukan fungsi yang lebih kompleks.
Logic state digunakan untuk mewakili data digital, seperti angka, huruf, dan simbol. Logic state juga digunakan untuk mengendalikan operasi dari perangkat digital, seperti komputer, ponsel, dan mesin industri.
Dalam elektronika digital, terdapat dua logic state, yaitu logic 0 dan logic 1.
- Logic 0 direpresentasikan oleh tegangan rendah, biasanya 0 volt atau 0,5 volt.
- Logic 1 direpresentasikan oleh tegangan tinggi, biasanya 5 volt atau 2,5 volt.
Logic state dapat direpresentasikan dengan berbagai cara, termasuk:
- Tegangan: Logic 0 direpresentasikan oleh tegangan rendah, dan logic 1 direpresentasikan oleh tegangan tinggi.
- Arus: Logic 0 direpresentasikan oleh arus rendah, dan logic 1 direpresentasikan oleh arus tinggi.
- Frekuensi: Logic 0 direpresentasikan oleh frekuensi rendah, dan logic 1 direpresentasikan oleh frekuensi tinggi.
- Waktu: Logic 0 direpresentasikan oleh waktu rendah, dan logic 1 direpresentasikan oleh waktu tinggi.
Logic state digunakan untuk mewakili data digital. Data digital adalah data yang terdiri dari angka 0 dan 1. Data digital dapat digunakan untuk mewakili berbagai informasi, seperti angka, huruf, simbol, dan gambar.
Logic state juga digunakan untuk mengendalikan operasi dari perangkat digital. Perangkat digital, seperti komputer, ponsel, dan mesin industri, menggunakan logic state untuk melakukan perhitungan, kontrol, dan komunikasi.
Berikut adalah beberapa contoh penggunaan logic state:
- Dalam komputer, logic state digunakan untuk mewakili data digital, seperti angka, huruf, dan simbol. Logic state juga digunakan untuk mengendalikan operasi dari komputer, seperti perhitungan, kontrol, dan komunikasi.
- Dalam ponsel, logic state digunakan untuk mewakili data digital, seperti angka, huruf, dan simbol. Logic state juga digunakan untuk mengendalikan operasi dari ponsel, seperti panggilan telepon, pengiriman pesan, dan akses internet.
- Dalam mesin industri, logic state digunakan untuk mengendalikan operasi dari mesin, seperti mesin produksi, mesin pengolahan, dan mesin transportasi.
Logic state adalah konsep dasar yang penting dalam elektronika digital. Logic state digunakan untuk mewakili data digital, mengendalikan operasi dari perangkat digital, dan berbagai keperluan lainnya.
- Motor DC

Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.


Prinsip kerja motor DC adalah berdasarkan interaksi antara medan magnet stator dan medan magnet rotor. Ketika arus listrik mengalir melalui kumparan stator, maka akan menghasilkan medan magnet. Medan magnet stator ini akan berinteraksi dengan medan magnet rotor. Interaksi ini akan menghasilkan gaya yang menyebabkan rotor berputar.
Kecepatan putar motor DC dapat diatur dengan mengubah tegangan atau arus yang mengalir melalui kumparan kendali.
Berikut adalah beberapa jenis motor DC:
- Motor DC seri: Motor DC seri adalah jenis motor DC yang paling sederhana. Motor DC seri memiliki kumparan medan dan kumparan kendali yang dirangkai secara seri. Motor DC seri memiliki torsi yang tinggi, tetapi kecepatannya terbatas.
- Motor DC shunt: Motor DC shunt adalah jenis motor DC yang memiliki kumparan medan dan kumparan kendali yang dirangkai secara paralel. Motor DC shunt memiliki torsi yang lebih rendah daripada motor DC seri, tetapi kecepatannya lebih tinggi.
- Motor DC compound: Motor DC compound adalah jenis motor DC yang memiliki kumparan medan dan kumparan kendali yang dirangkai secara seri dan paralel. Motor DC compound memiliki torsi yang tinggi dan kecepatan yang tinggi.
- Efisien: Motor DC memiliki efisiensi yang tinggi, yaitu sekitar 80%.
- Kontrol yang mudah: Motor DC dapat dikontrol dengan mudah dengan mengubah tegangan atau arus yang mengalir melalui kumparan kendali.
- Biaya yang rendah: Motor DC memiliki biaya yang relatif rendah.
Namun, motor DC juga memiliki beberapa kelemahan, antara lain:
- Berat: Motor DC memiliki berat yang lebih berat daripada motor AC.
- Ukuran: Motor DC memiliki ukuran yang lebih besar daripada motor AC.
- Ruis: Motor DC menghasilkan bunyi yang lebih bising daripada motor AC.
Motor DC banyak digunakan dalam berbagai peralatan, antara lain:
- Alat transportasi: Motor DC digunakan sebagai penggerak mobil listrik, motor skuter listrik, dan motor sepeda listrik.
- Peralatan industri: Motor DC digunakan sebagai penggerak mesin produksi, mesin pengolahan, dan mesin transportasi.
- Peralatan rumah tangga: Motor DC digunakan sebagai penggerak kipas angin, mesin cuci, dan blender.


Prinsip kerja IC 74HC373
Prinsip kerja IC 74HC373 adalah berdasarkan prinsip latch D. Dalam latch D, data pada input (D0-D3) akan diteruskan ke output (Q0-Q3) hanya jika input enable (LE) aktif. Jika input enable (LE) tidak aktif, maka output (Q0-Q3) akan tetap mempertahankan nilainya.
Tabel kebenaran IC 74HC373
Berikut adalah tabel kebenaran IC 74HC373:
| Input | Output |
|---|---|
| LE | Q0 |
| 0 | 0 |
| 1 | D0 |
Penggunaan IC 74HC373
IC 74HC373 dapat digunakan untuk berbagai keperluan, antara lain:
- Menyimpan data digital
- Mengontrol peralatan elektronik
- Membangun rangkaian logika
Berikut adalah beberapa contoh penggunaan IC 74HC373:
- Dalam sebuah sistem penghitung, IC 74HC373 dapat digunakan untuk menyimpan data digital, seperti angka atau huruf.
- Dalam sebuah mesin pengukur, IC 74HC373 dapat digunakan untuk mengontrol peralatan elektronik, seperti motor atau lampu.
- Dalam sebuah rangkaian logika, IC 74HC373 dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
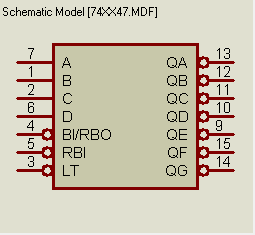
- IC 74LS47
IC 74LS47 adalah IC decoder BCD to 7-segment yang dirancang untuk bekerja dengan tegangan sumber +5 volt DC. IC ini memiliki 16 pin, dengan 4 pin untuk input data BCD (D0-D3), 7 pin untuk output 7-segment (A-G), dan 5 pin untuk kontrol (E, LE, R, S).

Here are the specification of IC 74LS47:
Specification | Value |
Function | Decoder, Demultiplexer |
Technology Family | LS |
VCC (Min) | 4.75V |
VCC (Max) | 5.25V |
Channels | 1 |
Voltage (Nom) | 5V |
Max Frequency at normal Voltage | 35 MHz |
tpd at normal Voltage (Max) | 100 ns |
Configuration | 4:7 |
Type | Open-Collector |
IOL (Max) | 3.2 mA |
IOH (Max) | -0.05 mA |
Rating | Catalog |
Operating temperature range (C) | 0 to 70 |
Bits (#) | 7 |
Digital input leakage (Max) | 5 uA |
ESD CDM (kV) | 0.75 |
ESD HBM (kV) | 2 |

IC 74LS47 Configuration
Pin No
Pin Name
Description
1
B
BCD input of the IC
2
C
BCD input of the IC
3
Display test/Lamp test
Used for testing the display LED or lamp test
4
Blank Input
Turns off the LEDs of the display
5
Store
Stores or strobes a BCD code
6
D
BCD input of the IC
7
A
BCD input of the IC
8
GND
Ground Pin
9
e
7-segment output 1
10
d
7-segment output 2
11
c
7-segment output 3
12
b
7-segment output 4
13
a
7-segment output 5
14
g
7-segment output 6
15
f
7-segment output 7
16
VCC
Supply Voltage (typically 5V)
Prinsip kerja IC 74LS47 adalah berdasarkan prinsip decoder. Dalam decoder, data input akan diubah menjadi data output yang sesuai. Pada IC 74LS47, data input BCD akan diubah menjadi data output 7-segment yang sesuai. Data output 7-segment ini dapat digunakan untuk menampilkan angka dari 0 hingga 9. IC 74LS47 dapat digunakan untuk berbagai keperluan, antara lain untuk Menampilkan angka dan Membangun rangkaian digital
Tabel kebenaran IC 74LS47
Berikut adalah tabel kebenaran IC 74LS47:
Input Output D0 A D1 B D2 C D3 D E E LE L R R S S
Berikut adalah beberapa contoh penggunaan IC 74LS47:
- Dalam sebuah jam digital, IC 74LS47 dapat digunakan untuk menampilkan angka jam dan menit.
- Dalam sebuah mesin penghitung, IC 74LS47 dapat digunakan untuk menampilkan hasil perhitungan.
- Dalam sebuah rangkaian logika, IC 74LS47 dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
Keterangan pin IC 74LS47
- Pin 1: VCC, tegangan sumber +5 volt DC
- Pin 2: GND, tegangan nol (ground)
- Pin 3: E, enable, input untuk mengaktifkan decoder
- Pin 4: LE, latch enable, input untuk menjaga nilai output tetap
- Pin 5: R, reset, input untuk mereset decoder
- Pin 6: S, serial input, input untuk mengubah nilai output secara serial
- Pin 7: A, output untuk segmen A
- Pin 8: B, output untuk segmen B
- Pin 9: C, output untuk segmen C
- Pin 10: D, output untuk segmen D
- Pin 11: E, output untuk segmen E
- Pin 12: F, output untuk segmen F
- Pin 13: G, output untuk segmen G
IC 74LS47 adalah IC yang serbaguna dan dapat digunakan untuk berbagai keperluan. IC ini memiliki harga yang relatif terjangkau dan mudah didapatkan.
- Prossesor 8088
Intel 8088 adalah mikroprosesor yang diproduksi oleh Intel Corporation pada tahun 1979. 8088 adalah versi 8-bit dari mikroprosesor 8086 yang lebih canggih. 8088 memiliki 16-bit register dan bus alamat, tetapi bus data 8-bit. 8088 digunakan dalam berbagai komputer pribadi, termasuk IBM PC dan kompatibelnya. 8088 juga digunakan dalam berbagai perangkat elektronik lainnya, seperti mesin pencetak dan pemindai.

Spesifikasi dari Prossesor 8088:
Arsitektur: 16-bitRegister:8 general purpose registers (AX, BX, CX, DX, SP, BP, SI, DI)6 segment registers (CS, DS, SS, ES, FS, GS)1 flag register (FLAGS)Data bus: 16 bitAlamat bus: 20 bitFrekuensi operasi: 5 MHz hingga 10 MHzKekuatan: 5 VProses pembuatan: NMOS
Konfigurasi PIN
Fungsi masing-masing pin dari mikroposessor 8088 adalah: 1. AD0 – AD7 adalah Bus address - data Jalur yang dimultipleks untuk menyalurkan data pada saat ALE aktif (1) atau byte rendah address pada saat ALE tidak aktif (0)
2. A8 – A15 adalah Bus address Bit – bit dimana A8 – A15 ada selama siklus bus
3. A19/S6, A18/S5, A17/S4, A16/S3 adalah Address / Status Kaki – kaki yang multiplek yang digunakan untuk bus address bit A16 – A19 pada saat ALE berlevel logika 1 dan untuk sisa silkus bus lainnya digunakan bit – bit status S3 – S6. Bit status S6 selalu berlogika 0, bit S5 menandakan kondisi dari bit flag I dan bit S3 san S4 yang mendakan segmen yang diakses selama siklus bus yang sedang berlangsung.
4. RD adalah Read Sinyal kontrol yang akan berlevel logika 0 pada saat data bus siap menerima data dari memori atau I/O yang diteruskan ke mikroprosesor.
5. WR adalah Read Sinyal kontrol yang akan berlevel logika 0 pada saat data bus siap menerima data dari mikroprosesor yang diteruskan ke memori atau I/O
6. READY adalah Ready Input ini diperiksa oleh 8088 pada akhir dari siklus T2. Jika dalam kondisi logika 0, maka siklus pembacaan atau penulisan data akan diperpanjang sampai input ini kembali ke logika 1.
7. INTR adalah Interrup Request Satu dari dua kali yang digunakan untuk menerima interupt hard-ware. Jika INTR diberi logika 1 pada saat flag 1 set, 8088 masuk ke siklus interupt acknowledge (INTA aktif) setelah intruksi yang sedang berlangsung selesai.
8. TEST adalah Test Diperiksa oleh intruksi WAIT. Jika TEST berlogika 0, maka instruksi WAIT akan meneruskan ke instruksi selanjutnya, jika TEST ‘1’, WAIT akan menunggu sampai TEST ‘0’.
9. NMI adalah Nonmaskable Interrupt Input yang mengaktifkan interrupt tipe 2 pada akhir dari instruksi yang sedang dilaksanakan.
10.RESET adalah Reset Kaki yang jika diberi level logika 1 untuk minimum 4 clock, akan mereset 8088. Pada saat 8088 reset, 8088 mulai melaksanakan instruksi pada address memori FFFF0H. Dan menon-aktifkan interupsi dengan mereset flag 1.
11.CLK adalah Clok Sebuah input yang menyediakan pewaktu dasar untuk 8088. Clok ini terus ber-duty-cycle 33 persen untuk memberikan pewaktu yang benar ke 8088.
12.VCC adalah Vcc Input tegangan pencatu +5V
13.GND adalah Ground Hubungan ke ground
14.MN/-MX adalah Mode Minimum / Maksimun Pin yang digunakan untuk memilih mode operasi minimum jika dihubungkan ke +5V dan mode maksimum jika dihubungkan ke ground.
15.IO/-M adalah Input/Output atau Memori Pin yang menunjukkan isi dari bus address adalah informasi pengaddress memori atau I/O 21
16.INTA adalah Interrupt Acknowledge Respon untuk INTR. Selama permintaan interupsi, pin INTA akan berlogika 0 untuk menunjukkan bahwa bus 8088 menunggu vector-number.
17.ALE adalah Addres Latch Enable Pin yang digunakan untuk menunjukkan bahwa bus address berisi address memori atau alamat port I/O
18.DT/-R adalah Transmite/ - Receive Pin yang digunakan untuk mengendalikan arah aliran data melewati buffer data.
19.–DEN adalah Data Bus Enable Pin yang aktif bila bus data telah berisi data
Mikroprosesor 8088 diset pada mode minimum dengan memberi logika HIGH pada pin 33 dan logika LOW jika difungsikan dalam mode maksimum. Untuk pengaddressan memori, mikroprosesor 8088 menyediakan 20 bit address yang 8 diantaranya dimultipleks dengan data yaitu AD0-AD7. Sedangkan A16-A19 dimultipleks dengan sinyal kontrol S3-S6.
Untuk pengaddressan I/O port dan memori, 8088 menggunakan pin 28, jika pin 28 dalam kondisi HIGH maka address yang dikirim adalah address untuk I/O port dan jika dalam kondisi LOW maka address yang difungsikan adalah address dari memori. Selain itu 8088 juga dapat mengirimkan sinyal RD dan WR (keduanya aktif low) yang bertujuan untuk membaca dan menulis di memori atau I/O Port.
Misalkan sistem minimum menggunakan dua buah macam memori yaitu EPROM 27128 berkapasitas 16 K Bytes dan RAM statis 6116 yang berkapasitas 2 K Bytes. Setelah tombol RESET ditekan maka mikroprosesor akan menunjuk pertama kali pada address FFFF0h sehingga address tersebut harus sudah ada instruksi lompat ke awal program. Oleh karena itu EPROM diletakkan pada bagian terakhir memori sedangkan RAM diletakkan pada bagian awal memori 22 karena untuk penggunaan interrupt, 8088 memakai address 00000h003FFh sebagai tabel vector interrupt.
Mikroprosessor 8088 memiliki empat kelompok register 16-bit, yaitu : - Data Register - Pointer dan Index Register - Flag Register dan Instruction Pointer - Segment Register
8088 adalah mikroprosesor yang penting dalam sejarah komputer pribadi. 8088 membantu menjadikan komputer pribadi terjangkau dan populer.
Berikut adalah beberapa fitur utama dari 8088:
- Register 16-bit: 8088 memiliki 16-bit register, yang memungkinkannya untuk menangani angka dan alamat yang lebih besar daripada mikroprosesor 8-bit.
- Bus alamat 16-bit: Bus alamat 16-bit memungkinkan 8088 untuk mengakses hingga 64 KB memori.
- Bus data 8-bit: Bus data 8-bit membatasi kinerja 8088, tetapi memungkinkannya untuk digunakan dengan komponen 8-bit yang lebih murah.
- Instruksi 242: 8088 memiliki 242 instruksi, yang memberinya kemampuan untuk menjalankan berbagai tugas.
- Memori 1 MB: 8088 dapat mengakses hingga 1 MB memori, yang cukup untuk menjalankan sistem operasi dan aplikasi yang kompleks.
8088 adalah mikroprosesor yang penting dalam sejarah komputer pribadi. 8088 membantu menjadikan komputer pribadi terjangkau dan populer.
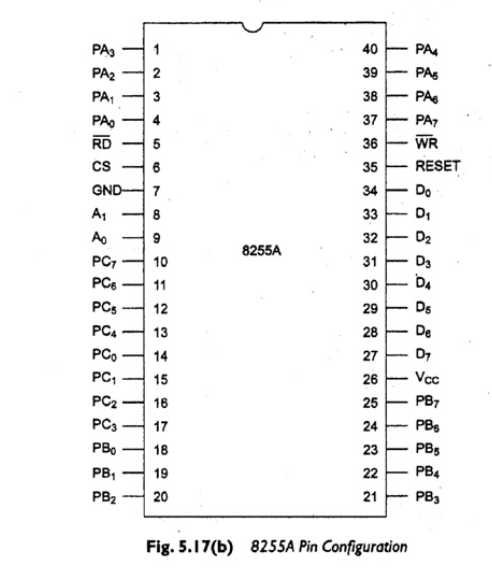
- IC 8255A
IC 8255A adalah IC programmable peripheral interface (PPI) yang dirancang untuk bekerja dengan tegangan sumber +5 volt DC. IC ini memiliki 24 pin, dengan 16 pin untuk input/output, empat pin untuk kontrol, dan empat pin untuk sumber daya.

Spesifikasi dari IC 8255A:
Arsitektur: 8 bitPort: 3 buah port 8 bitMode operasi: 3 modeFrekuensi operasi: 0 hingga 10 MHzKekuatan: 5 VProses pembuatan: NMOS
Konfigurasi PIN
Konfigurasi PIN :
Pin 1-4: VCC (tegangan suplai) Pin 5-6: GND (tegangan nol) Pin 7: RESET (reset) Pin 8: CS (chip select) Pin 9-10: A0-A1 (alamat bus)Pin 11-18: D0-D8 (data bus)Pin 19: INT (interrupt) Pin 20: MODE (mode) Pin 21: INH (input enable) Pin 22: OBF (output buffer full) Pin 23: IBF (input buffer full) Pin 24: WR (write) Pin 25: RD (read) Pin 27-30: PA0-PA7 (port A)Pin 31-36: PB0-PB7 (port B)Pin 37-40: PC0-PC7 (port C)
Prinsip kerja IC 8255A adalah berdasarkan prinsip PPI. Dalam PPI, data input dapat diubah menjadi data output, atau data input dapat digunakan untuk mengontrol peralatan elektronik.
Pada IC 8255A, data input/output dapat dikonfigurasi ke dalam berbagai mode, seperti:
- Mode Input: Mode Input memungkinkan data input dari peralatan elektronik untuk dibaca oleh mikroprosesor.
- Mode Output: Mode Output memungkinkan data output dari mikroprosesor untuk ditulis ke peralatan elektronik.
- Mode Bidirectional: Mode Bidirectional memungkinkan data input/output dikonfigurasikan secara dinamis.
Penggunaan IC 8255A
IC 8255A dapat digunakan untuk berbagai keperluan, antara lain:
- Membangun rangkaian input/output
- Mengontrol peralatan elektronik
- Membangun rangkaian logika
Berikut adalah beberapa contoh penggunaan IC 8255A:
- Dalam sebuah sistem penghitung, IC 8255A dapat digunakan untuk membaca data dari sensor atau mengontrol peralatan elektronik.
- Dalam sebuah mesin pengukur, IC 8255A dapat digunakan untuk menampilkan data ke layar atau mengontrol motor.
- Dalam sebuah rangkaian logika, IC 8255A dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
- IC L293D
IC L293D adalah IC driver motor DC ganda yang dirancang untuk bekerja dengan tegangan sumber +5 volt DC. IC ini memiliki 16 pin, dengan 4 pin untuk input data (A, B, C, dan D), 4 pin untuk output motor (1A, 1B, 2A, dan 2B), dan 8 pin untuk kontrol (EN1, EN2, IN1, IN2, IN3, IN4, VCC, dan GND).
Prinsip kerja IC L293D adalah berdasarkan prinsip driver motor DC. Dalam driver motor DC, input data (A, B, C, dan D) akan dikonversi menjadi output motor (1A, 1B, 2A, dan 2B). Pada IC L293D, input data (A, B, C, dan D) dapat digunakan untuk mengendalikan arah dan kecepatan motor.
 Spesifikasi L293D:
Spesifikasi L293D:
Arsitektur: Half-H bridgeKanal: 4Motor DC: 2Solenoid: 4Tegangan suplai: 4.5 V hingga 36 VArus maksimum: 600 mA per channel
Konfigurasi L293D : IC L293D memiliki 16 pin yang berfungsi sebagai berikut:
IC L293D memiliki 16 pin yang berfungsi sebagai berikut:
Pin 1-4: VCC (tegangan suplai)Pin 5-6: GND (tegangan nol)Pin 7: ENA (enable A)Pin 8: IN1 (input 1 A)Pin 9: IN2 (input 2 A)Pin 10: OUT1 (output 1 A)Pin 11: OUT2 (output 2 A)Pin 12: ENB (enable B)Pin 13: IN3 (input 1 B)Pin 14: IN4 (input 2 B)Pin 15: OUT3 (output 1 B)Pin 16: OUT4 (output 2 B)
Pin ENA dan ENB digunakan untuk mengaktifkan channel A dan B. Pin IN1, IN2, IN3, dan IN4 digunakan untuk memberikan input ke channel A dan B. Pin OUT1, OUT2, OUT3, dan OUT4 digunakan untuk mengeluarkan output dari channel A dan B.
Berikut adalah tabel kebenaran IC L293D:
Input data Output motor A = 0, B = 1 Motor 1 maju A = 1, B = 0 Motor 1 mundur A = 0, B = 0 Motor 1 berhenti A = 1, B = 1 Motor 1 mati C = 0, D = 1 Motor 2 maju C = 1, D = 0 Motor 2 mundur C = 0, D = 0 Motor 2 berhenti C = 1, D = 1 Motor 2 mati
Penggunaan IC L293D
IC L293D dapat digunakan untuk berbagai keperluan, antara lain:
- Mengontrol motor DC
- Membangun robot
- Membangun mesin
Berikut adalah beberapa contoh penggunaan IC L293D:
- Dalam sebuah robot, IC L293D dapat digunakan untuk mengendalikan motor penggerak robot.
- Dalam sebuah mesin, IC L293D dapat digunakan untuk mengendalikan motor untuk menggerakkan komponen mesin.
-SENSOR LDR

Pin No | Pin Name | Description |
1 | B | BCD input of the IC |
2 | C | BCD input of the IC |
3 | Display test/Lamp test | Used for testing the display LED or lamp test |
4 | Blank Input | Turns off the LEDs of the display |
5 | Store | Stores or strobes a BCD code |
6 | D | BCD input of the IC |
7 | A | BCD input of the IC |
8 | GND | Ground Pin |
9 | e | 7-segment output 1 |
10 | d | 7-segment output 2 |
11 | c | 7-segment output 3 |
12 | b | 7-segment output 4 |
13 | a | 7-segment output 5 |
14 | g | 7-segment output 6 |
15 | f | 7-segment output 7 |
16 | VCC | Supply Voltage (typically 5V) |
Prinsip kerja IC 74LS47 adalah berdasarkan prinsip decoder. Dalam decoder, data input akan diubah menjadi data output yang sesuai. Pada IC 74LS47, data input BCD akan diubah menjadi data output 7-segment yang sesuai. Data output 7-segment ini dapat digunakan untuk menampilkan angka dari 0 hingga 9. IC 74LS47 dapat digunakan untuk berbagai keperluan, antara lain untuk Menampilkan angka dan Membangun rangkaian digital
Tabel kebenaran IC 74LS47
Berikut adalah tabel kebenaran IC 74LS47:
| Input | Output |
|---|---|
| D0 | A |
| D1 | B |
| D2 | C |
| D3 | D |
| E | E |
| LE | L |
| R | R |
| S | S |
Berikut adalah beberapa contoh penggunaan IC 74LS47:
- Dalam sebuah jam digital, IC 74LS47 dapat digunakan untuk menampilkan angka jam dan menit.
- Dalam sebuah mesin penghitung, IC 74LS47 dapat digunakan untuk menampilkan hasil perhitungan.
- Dalam sebuah rangkaian logika, IC 74LS47 dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
Keterangan pin IC 74LS47
- Pin 1: VCC, tegangan sumber +5 volt DC
- Pin 2: GND, tegangan nol (ground)
- Pin 3: E, enable, input untuk mengaktifkan decoder
- Pin 4: LE, latch enable, input untuk menjaga nilai output tetap
- Pin 5: R, reset, input untuk mereset decoder
- Pin 6: S, serial input, input untuk mengubah nilai output secara serial
- Pin 7: A, output untuk segmen A
- Pin 8: B, output untuk segmen B
- Pin 9: C, output untuk segmen C
- Pin 10: D, output untuk segmen D
- Pin 11: E, output untuk segmen E
- Pin 12: F, output untuk segmen F
- Pin 13: G, output untuk segmen G
IC 74LS47 adalah IC yang serbaguna dan dapat digunakan untuk berbagai keperluan. IC ini memiliki harga yang relatif terjangkau dan mudah didapatkan.
8088 adalah mikroprosesor yang penting dalam sejarah komputer pribadi. 8088 membantu menjadikan komputer pribadi terjangkau dan populer.
Berikut adalah beberapa fitur utama dari 8088:
- Register 16-bit: 8088 memiliki 16-bit register, yang memungkinkannya untuk menangani angka dan alamat yang lebih besar daripada mikroprosesor 8-bit.
- Bus alamat 16-bit: Bus alamat 16-bit memungkinkan 8088 untuk mengakses hingga 64 KB memori.
- Bus data 8-bit: Bus data 8-bit membatasi kinerja 8088, tetapi memungkinkannya untuk digunakan dengan komponen 8-bit yang lebih murah.
- Instruksi 242: 8088 memiliki 242 instruksi, yang memberinya kemampuan untuk menjalankan berbagai tugas.
- Memori 1 MB: 8088 dapat mengakses hingga 1 MB memori, yang cukup untuk menjalankan sistem operasi dan aplikasi yang kompleks.
8088 adalah mikroprosesor yang penting dalam sejarah komputer pribadi. 8088 membantu menjadikan komputer pribadi terjangkau dan populer.
Prinsip kerja IC 8255A adalah berdasarkan prinsip PPI. Dalam PPI, data input dapat diubah menjadi data output, atau data input dapat digunakan untuk mengontrol peralatan elektronik.
Pada IC 8255A, data input/output dapat dikonfigurasi ke dalam berbagai mode, seperti:
- Mode Input: Mode Input memungkinkan data input dari peralatan elektronik untuk dibaca oleh mikroprosesor.
- Mode Output: Mode Output memungkinkan data output dari mikroprosesor untuk ditulis ke peralatan elektronik.
- Mode Bidirectional: Mode Bidirectional memungkinkan data input/output dikonfigurasikan secara dinamis.
Penggunaan IC 8255A
IC 8255A dapat digunakan untuk berbagai keperluan, antara lain:
- Membangun rangkaian input/output
- Mengontrol peralatan elektronik
- Membangun rangkaian logika
Berikut adalah beberapa contoh penggunaan IC 8255A:
- Dalam sebuah sistem penghitung, IC 8255A dapat digunakan untuk membaca data dari sensor atau mengontrol peralatan elektronik.
- Dalam sebuah mesin pengukur, IC 8255A dapat digunakan untuk menampilkan data ke layar atau mengontrol motor.
- Dalam sebuah rangkaian logika, IC 8255A dapat digunakan untuk membangun rangkaian logika yang lebih kompleks.
IC L293D adalah IC driver motor DC ganda yang dirancang untuk bekerja dengan tegangan sumber +5 volt DC. IC ini memiliki 16 pin, dengan 4 pin untuk input data (A, B, C, dan D), 4 pin untuk output motor (1A, 1B, 2A, dan 2B), dan 8 pin untuk kontrol (EN1, EN2, IN1, IN2, IN3, IN4, VCC, dan GND).
Prinsip kerja IC L293D adalah berdasarkan prinsip driver motor DC. Dalam driver motor DC, input data (A, B, C, dan D) akan dikonversi menjadi output motor (1A, 1B, 2A, dan 2B). Pada IC L293D, input data (A, B, C, dan D) dapat digunakan untuk mengendalikan arah dan kecepatan motor.

Berikut adalah tabel kebenaran IC L293D:
| Input data | Output motor |
|---|---|
| A = 0, B = 1 | Motor 1 maju |
| A = 1, B = 0 | Motor 1 mundur |
| A = 0, B = 0 | Motor 1 berhenti |
| A = 1, B = 1 | Motor 1 mati |
| C = 0, D = 1 | Motor 2 maju |
| C = 1, D = 0 | Motor 2 mundur |
| C = 0, D = 0 | Motor 2 berhenti |
| C = 1, D = 1 | Motor 2 mati |
Penggunaan IC L293D
IC L293D dapat digunakan untuk berbagai keperluan, antara lain:
- Mengontrol motor DC
- Membangun robot
- Membangun mesin
Berikut adalah beberapa contoh penggunaan IC L293D:
- Dalam sebuah robot, IC L293D dapat digunakan untuk mengendalikan motor penggerak robot.
- Dalam sebuah mesin, IC L293D dapat digunakan untuk mengendalikan motor untuk menggerakkan komponen mesin.

LDR (Light Dependent Resistor) adalah salah satu jenis resistor yang dapat mengalami perubahan resistansinya apabila mengalami perubahan penerimaan cahaya. Modul sensor cahaya bekerja manghasilkan output yang mendeteksi nilai intensitas cahaya. Perangkat ini sangat cocok digunakan untuk project yang berhubungan dengan cahaya seperti nyala mati lampu.
Spesifikasi :
- 1. Supply : 3.3 V – 5 V (arduino available)
- 2. Output Type: Digital Output (0 and 1)
- 3. Inverse output
- 4. Include IC LM393 voltage comparator
- 5. Sensitivitasnya dapat diatur
- 6. Dimensi PCB size: 3.2 cm x 1.4 cm
Modul sensor cahaya ini memudahkan Anda dalam menggunakan sensor LDR (Light Dependent Resistor) untuk mengukur intensitas cahaya. Modul LDR ini memiliki pin output analog dan pin output digital dengan label AO dan DO pada PCB. Nilai resistansi LDR pada pin analog akan meningkat apabila intensitas cahaya meningkat dan menurun ketika intensitas cahaya semakin gelap. Pada pin digital, pada batas tertentu DO akan high atau low, yang dikendalikan sensitivitas nya menggunakan on-board potensiometer.
• Input Voltage: DC 3.3V - 5V
• Output: Digital - Sensitivitas bisa diatur, dan analog
• Ukuran PCB : 33 mm x 15 mm
LDR atau Light Dependent Resistor merupakan salah satu komponen jenis resistor dengan nilai resistansi yang terus berubah sesuai intensitas cahaya yang mengenai sensor. Semakin banyak cahaya yang mengenai sensor LDR, maka akan semakin menurun nilai resistansinya. Nah, semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai resistansinya akan semakin besar, jadi arus listrik yang mengalir akan terhambat.
Pada umumnya, sensor LDR mempunyai nilai resistansi sebesar 200 KOhm di tengah kegelapan dan akan turun menjadi 500 Ohm saat terkena banyak cahaya. Oleh karena itu, menjadi hal biasa apabila komponen elektronika yang peka cahaya ini sering digunakan untuk lampu alarm, kamar tidur, penerangan jalan dan lain sebagainya.
LDR memiliki peran sebagai sensor cahaya di dalam aneka rangkaian elektronika seperti saklar otomatis berdasarkan cahaya. Jadi jika sensor terkena cahaya, maka arus listrik akan mengalir (ON) dan jika sensor berada di dalam kondisi minim cahaya alias gelap, maka aliran listrik akan terhambat (OFF). LDR sering digunakan untuk sensor lampu kamar tidur, penerangan jalan otomatis, alarm dan lain sebagainya.
Cara kerja sensor LDR
LDR dapat dipasang pada aneka rangkaian elektronika untuk memutuskan dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR, maka nilai resistansinya akan menurun. Semakin sedikit cahaya yang mengenai LDR, maka nilai resistansinya akan meningkat.
Grafik Sensor LDR terhadap intensitas cahaya


Kodingan :Segmen Data:PORTA, PORTC, dan PORT_CON diberi alamat memori menggunakan direktif EQU.
Segmen Kode:MOV AX, DATA dan MOV DS, AX mengatur register segmen data.ORG 0000H menentukan asal kode di alamat 0000H.Label START menandai awal program.Kode memanipulasi port untuk menghasilkan pola biner yang disimpan dalam array S1, S2, dan S3.
Inisialisasi:Nilai 10000000B ditulis ke PORT_CON untuk menginisialisasinya.
Lingkaran Keluaran untuk S1:S1 adalah array 16-byte yang mewakili 16 pola biner.Sebuah loop (L0) melakukan iterasi melalui setiap pola, dan loop dalam (L1) mengeluarkan setiap bit ke PORTA.Setelah 16 pola, proses diulangi dengan nilai berbeda yang ditulis ke PORT_CON.
Lingkaran Keluaran untuk S2:S2 adalah array 4-byte yang mewakili 4 pola biner.Mirip dengan loop keluaran S1, kode tersebut mengeluarkan pola biner ke PORTC.
Lingkaran Keluaran untuk S3:S3 adalah array 8-byte yang mewakili 8 pola biner.Kode menampilkan pola-pola ini ke PORTC.
Lompat Kembali ke MULAI:JMP START membuat loop tak terbatas, memulai ulang urutannya.
Definisi Data:Pola biner untuk S1, S2, dan S3 didefinisikan sebagai array byte.Tabel Vektor Interupsi:
ORG 1000H menentukan asal tabel vektor interupsi.
VIDEO TEORI
LDR (Light Dependent Resistor) adalah salah satu jenis resistor yang dapat mengalami perubahan resistansinya apabila mengalami perubahan penerimaan cahaya. Modul sensor cahaya bekerja manghasilkan output yang mendeteksi nilai intensitas cahaya. Perangkat ini sangat cocok digunakan untuk project yang berhubungan dengan cahaya seperti nyala mati lampu.
Spesifikasi :
- 1. Supply : 3.3 V – 5 V (arduino available)
- 2. Output Type: Digital Output (0 and 1)
- 3. Inverse output
- 4. Include IC LM393 voltage comparator
- 5. Sensitivitasnya dapat diatur
- 6. Dimensi PCB size: 3.2 cm x 1.4 cm
Modul sensor cahaya ini memudahkan Anda dalam menggunakan sensor LDR (Light Dependent Resistor) untuk mengukur intensitas cahaya. Modul LDR ini memiliki pin output analog dan pin output digital dengan label AO dan DO pada PCB. Nilai resistansi LDR pada pin analog akan meningkat apabila intensitas cahaya meningkat dan menurun ketika intensitas cahaya semakin gelap. Pada pin digital, pada batas tertentu DO akan high atau low, yang dikendalikan sensitivitas nya menggunakan on-board potensiometer.
• Input Voltage: DC 3.3V - 5V
• Output: Digital - Sensitivitas bisa diatur, dan analog
• Ukuran PCB : 33 mm x 15 mm
LDR atau Light Dependent Resistor merupakan salah satu komponen jenis resistor dengan nilai resistansi yang terus berubah sesuai intensitas cahaya yang mengenai sensor. Semakin banyak cahaya yang mengenai sensor LDR, maka akan semakin menurun nilai resistansinya. Nah, semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai resistansinya akan semakin besar, jadi arus listrik yang mengalir akan terhambat.
Pada umumnya, sensor LDR mempunyai nilai resistansi sebesar 200 KOhm di tengah kegelapan dan akan turun menjadi 500 Ohm saat terkena banyak cahaya. Oleh karena itu, menjadi hal biasa apabila komponen elektronika yang peka cahaya ini sering digunakan untuk lampu alarm, kamar tidur, penerangan jalan dan lain sebagainya.
LDR memiliki peran sebagai sensor cahaya di dalam aneka rangkaian elektronika seperti saklar otomatis berdasarkan cahaya. Jadi jika sensor terkena cahaya, maka arus listrik akan mengalir (ON) dan jika sensor berada di dalam kondisi minim cahaya alias gelap, maka aliran listrik akan terhambat (OFF). LDR sering digunakan untuk sensor lampu kamar tidur, penerangan jalan otomatis, alarm dan lain sebagainya.
Cara kerja sensor LDR
LDR dapat dipasang pada aneka rangkaian elektronika untuk memutuskan dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR, maka nilai resistansinya akan menurun. Semakin sedikit cahaya yang mengenai LDR, maka nilai resistansinya akan meningkat.
Grafik Sensor LDR terhadap intensitas cahaya


4. Rangkaian [Kembali]


5. Video [Kembali]
6. Download File [Kembali]
File Rangkaian Klik DisiniCode Mikroprosesor 8086 Klik DisiniDataSheet Sensor LDR Klik DisiniDataSheet Resistor 10k Klik disiniDataSheet Dioda Klik disiniDataSheet Motor DC Klik disiniDataSheet Switch Klik DisiniDataSheet 7 segment Klik DisiniDataSheet Gerbang Not Klik DisiniDataSheet Potensiometer Klik DisiniDataSheet Baterai Klik DisiniDataSheet OpAmp Klik DisiniDataSheet IC 74HC373 klik DisiniDataSheet IC 74LS47 Klik DisiniDataSheet IC 74LS147 Klik Disini
Datasheet Mikroprossesor 8086 klik DisiniDataSheet IC 8255A Klik DisiniDataSheet L293D Klik Disini


{kind=link}
Komentar
Posting Komentar